Projects
A collection of 19 research and development projects spanning deep learning, computer vision, IoT, robotics, AI, and embedded systems.
All Projects
Surveillance System to Track Individuals Using Gait Biometrics
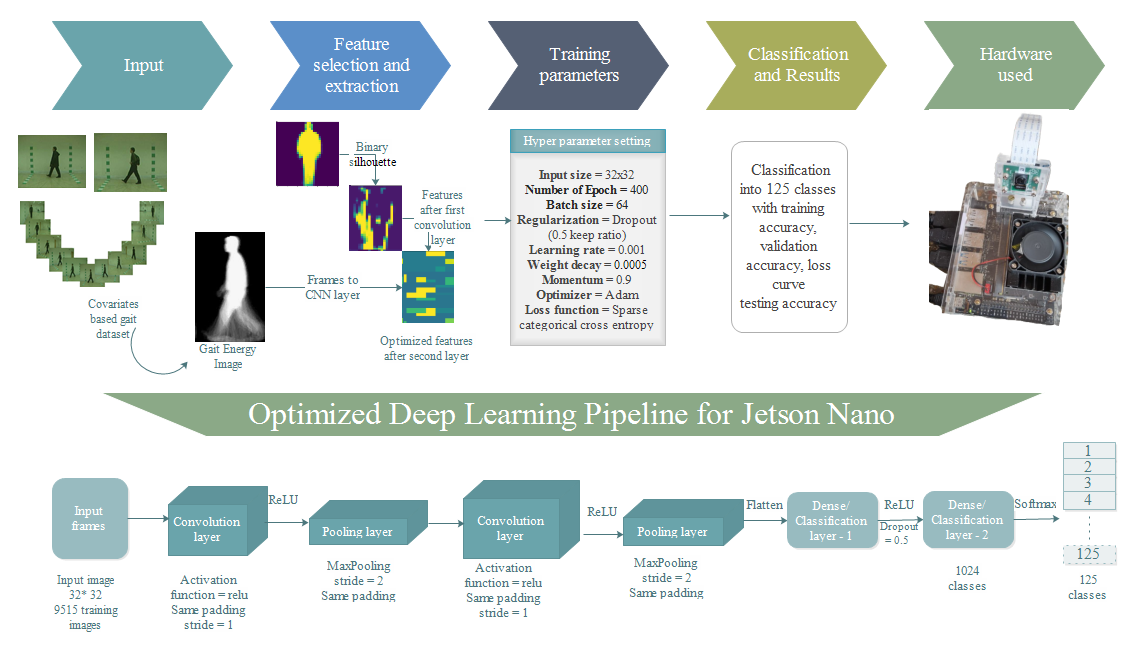
Human gait recognition using model-free approaches is done through analysis of moving shape and motion of the subject's body. This approach enables recognition at large distances with sufficiently low-resolution images and is simple and intuitive for extracting gait signatures from gait frames.
The most interesting research in biometrics is automatic gait recognition compared to other human unique features. Though there are many approaches to overcome variations in gait recognition, challenges remain: distinctive gait datasets, degree of stability in identifying, sensing modality, covariates and spoofing effects, and exploring new algorithms. From a developmental perspective, human gait recognition has gained maturity in adopting recent methodologies to provide high accuracy. This paper surveys recent deep architecture models on human gait identification, authentication and clinical applications.
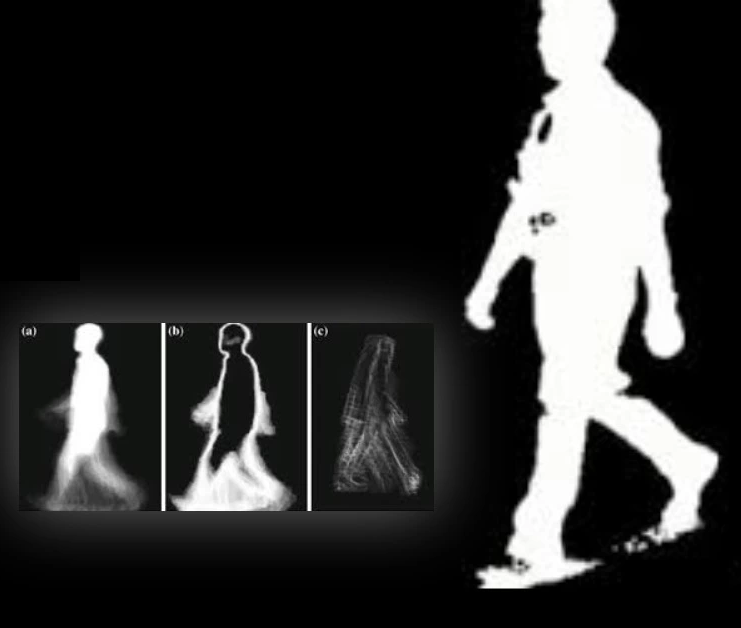

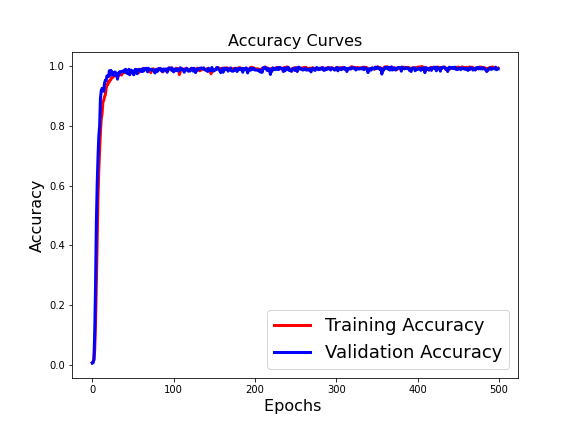
The Gait Recognition System (GRS) is a biometric system used for security. A unique, fully automated, optimal technique for edge devices is proposed using deep learning as DeepGait. The pipeline includes preprocessing original video frames, creating an optimal deep learning pipeline using CNN for feature extraction, reducing additional features, hyper-tuning the network for all covariate circumstances, and subject detection. In the CASIA B dataset, eleven distinct view angles, occlusion in carrying state, and apparel variation are used. An accuracy of 98.64% is reached on the Jetson Nano — a considerable increase over current state-of-the-art on edge devices.
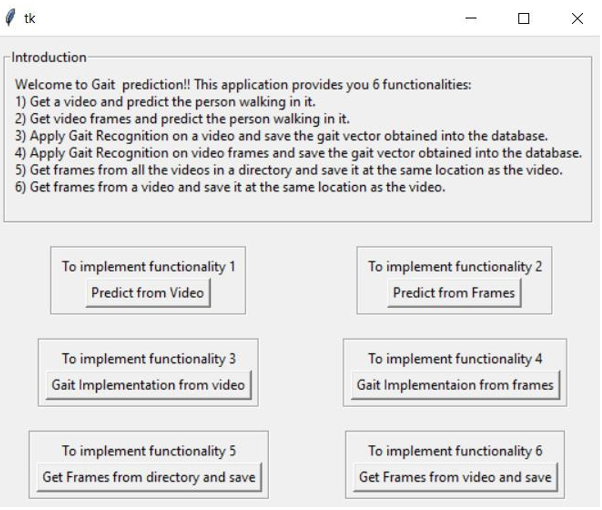
Interface Preview
Performance
Outcome
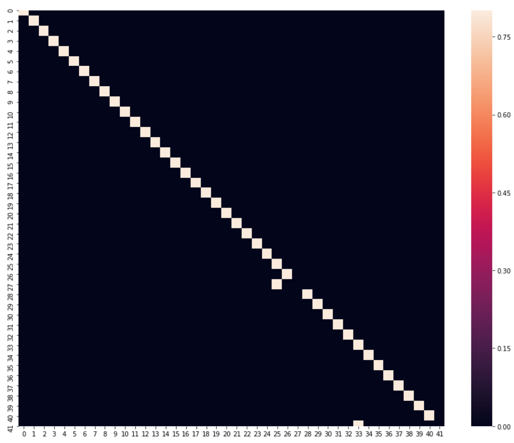
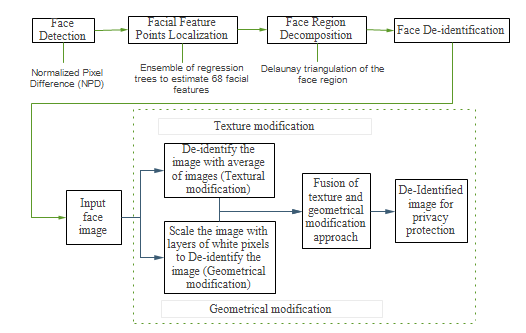
Face De-Identification Pipeline Based on Physiological & Machine Recognition Experiments Using Deep Learning
We proposed a reversible face de-identification pipeline that modifies face geometry and texture. Fourteen parameters for geometrical modification are used. For texture modification, a fixed face texture template is applied.
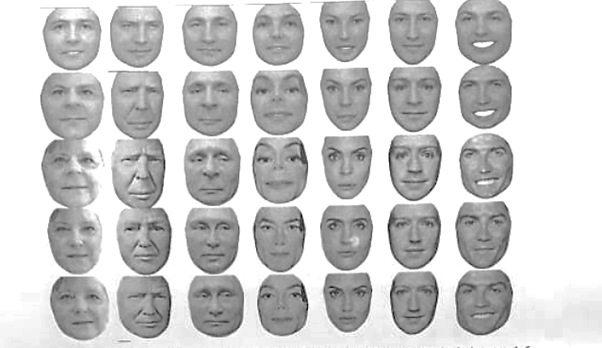
We compiled a set of 30 face images of famous people (7 females and 23 males, ages 30–75) from politics, sports, business and entertainment. The testing procedure mirrors that used for diagnosing prosopagnosia. Images of de-identified faces were presented to 150 test subjects requesting recognition. The aim was to evaluate the impact of geometrical and texture modifications on human ability to recognize faces via crowdsourcing. Context and biometric cues like hair and ears were removed in all tests.
Outcome
Investigated the impact of various geometrical and texture modifications of face components (eyes, eyebrows, nose and lips) on the ability of humans and machines to recognize faces. The study showed that face texture has a stronger impact on privacy protection than face geometry (shape) modifications.
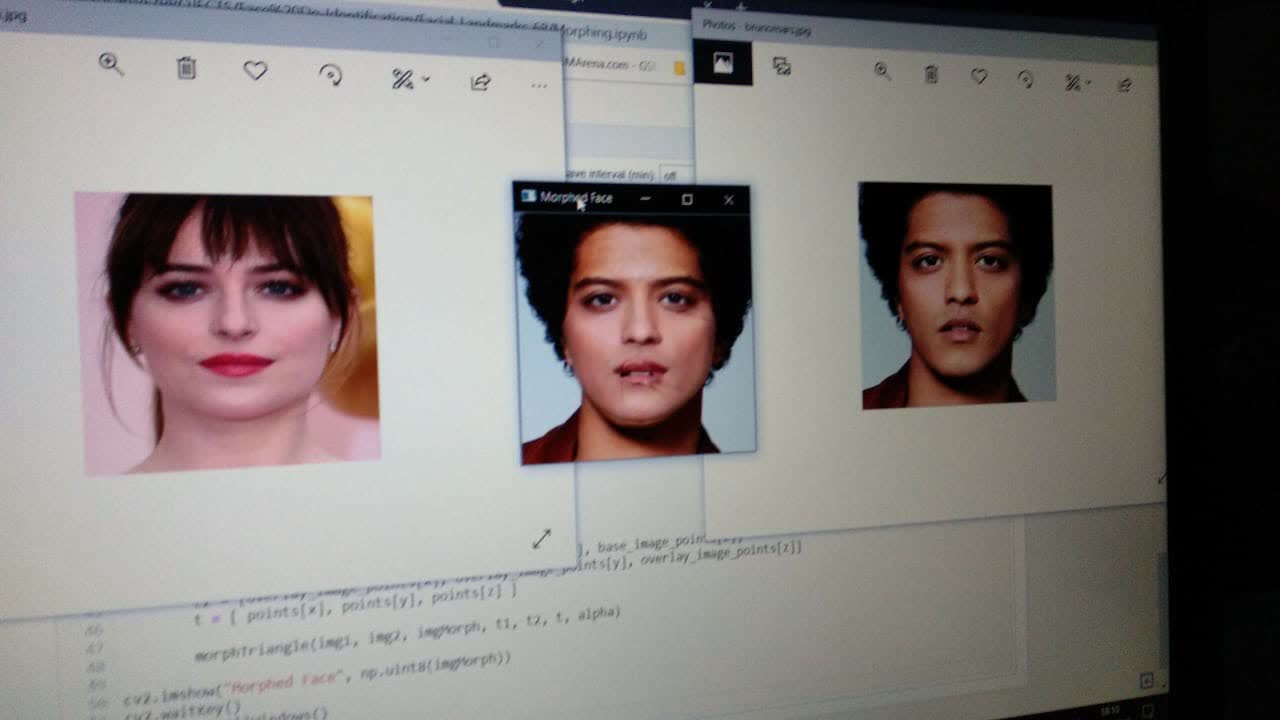
Interface Preview
Face Dataset
Classification Of Gait Data Using Machine Learning Techniques To Categorise Human Locomotion
Demonstrated the importance of gait recognition in order to detect whether a human gait is normal or pathological. Three main approaches were explored: back propagation and KNN. After comparing testing and training results, better outcomes were achieved using back propagation.
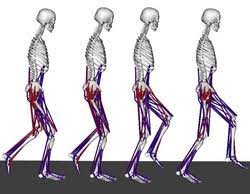
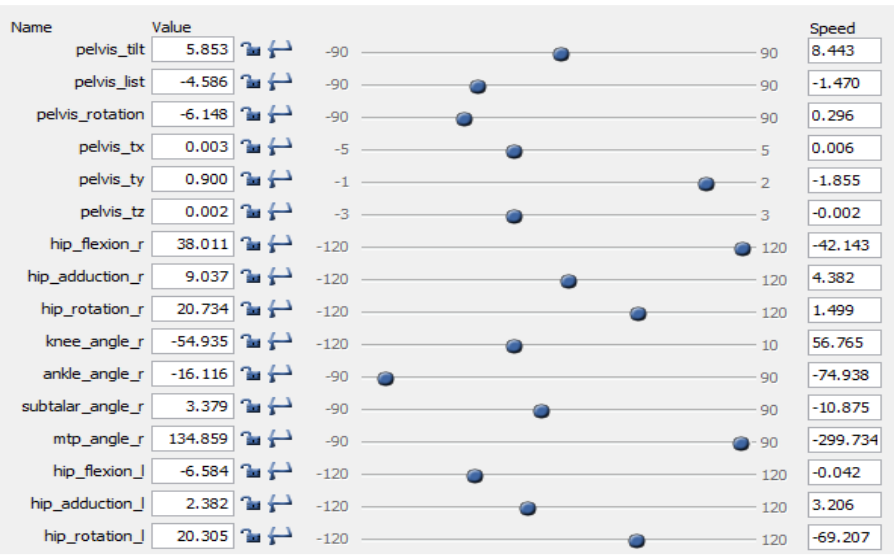
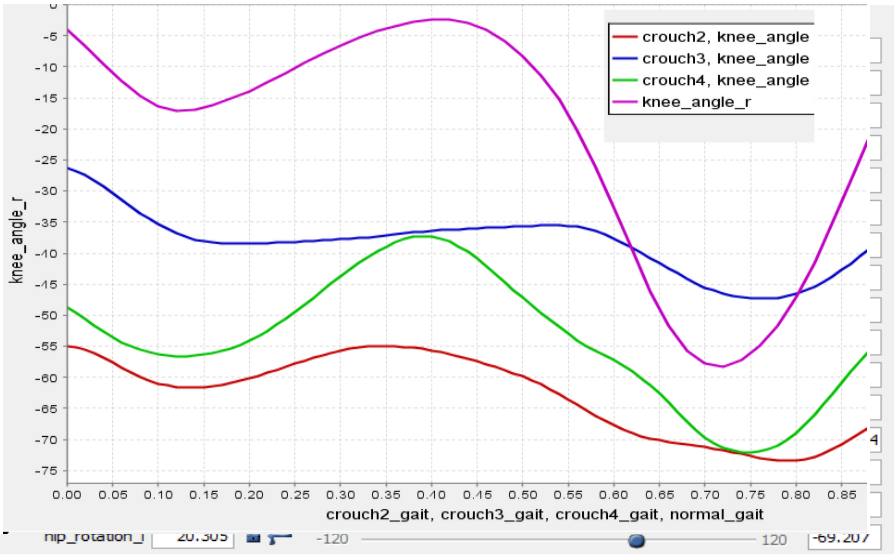
The work classifies gait into four categories: Normal, Crouch2, Crouch3, Crouch4 using back propagation and KNN. When training is complete, the output is one of the four options. If the testing dataset is tested on the proposed system, the output will be normal gait if the classifier correctly identifies it as normal, or abnormal gait if it falls into Crouch2, Crouch3, or Crouch4.
Interface Preview
Performance
Outcome
Features were selected and principal components identified, then gait data was classified using K-mean, KNN and Back Propagation techniques. Performance comparison on real-time datasets shows the proposed method outperforms previous methods for humanoid locomotion classification.
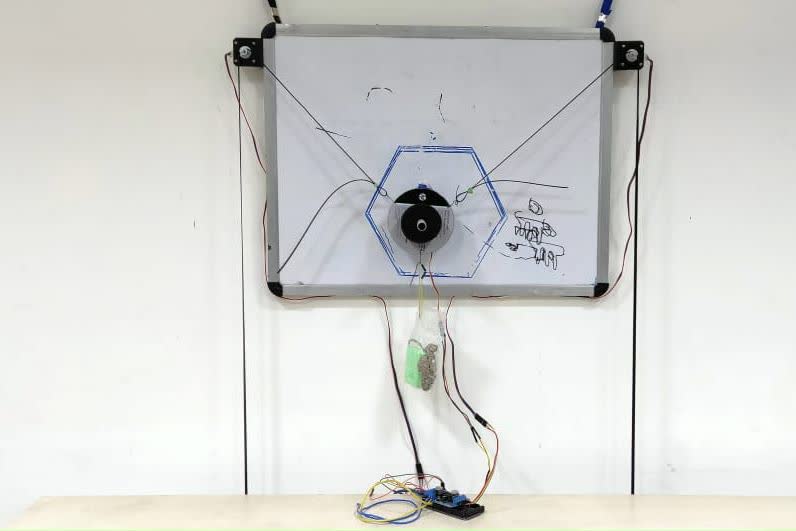
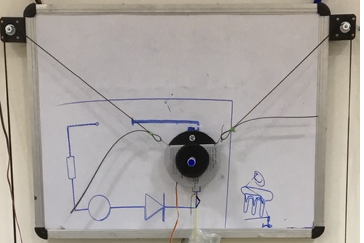
Low-cost IoT Enabled Board Marker using Image Processing
This project is based on robotics. Robots have been easing human tasks for decades; this time they contribute toward modern education. A robot is fed a reference drawing — mostly text-based input or a diagram — which it replicates on a whiteboard or notebook.
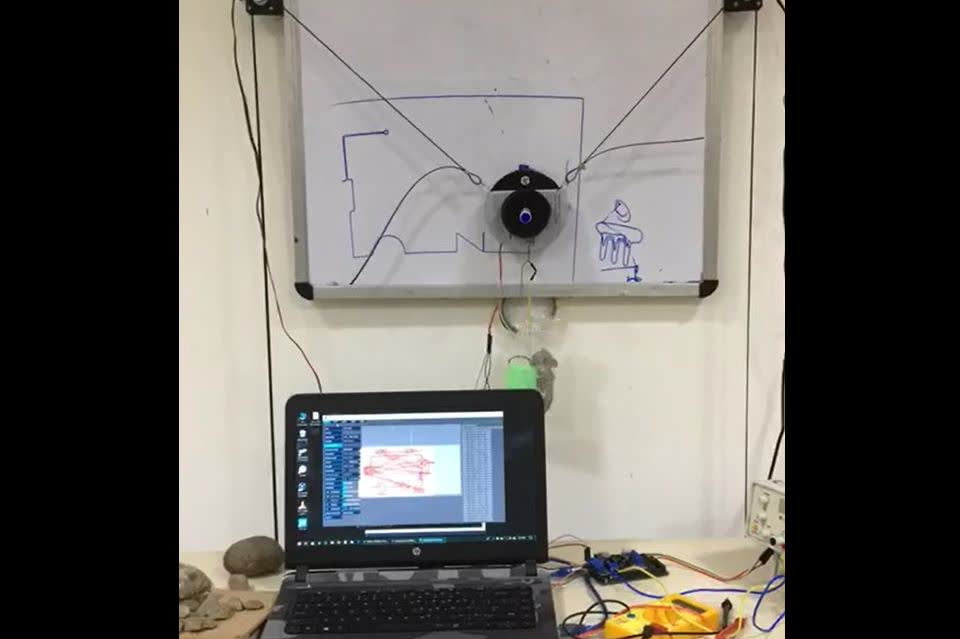
The application running on PC recognizes the edges of the image and sends command numbers to the microcontroller. The microcontroller rotates stepper motors as per the image requirement; a servo motor at the pen-holder acts as a pen-lifting mechanism. The pulley system adds maneuverability while cutting costs. The system works as predicted and produces good quality drawings on the drawing pad.
Interface Preview
Performance
Outcome
With 9V DC supply, stepper motors run smoothly with no jitters and the circuit doesn't overheat. Pen-lift actions are fluid and precise; the system responds to drawing commands in 0.5–1 second.
IoT Enabled Mechanical Chess based on Artificial Intelligence
An automated AI chess board — a physical chess board that lets the player play against an AI. Powered by Raspberry Pi, using core XY motion of two motors enabling an electromagnet to span the full chess board and slide pieces across it.
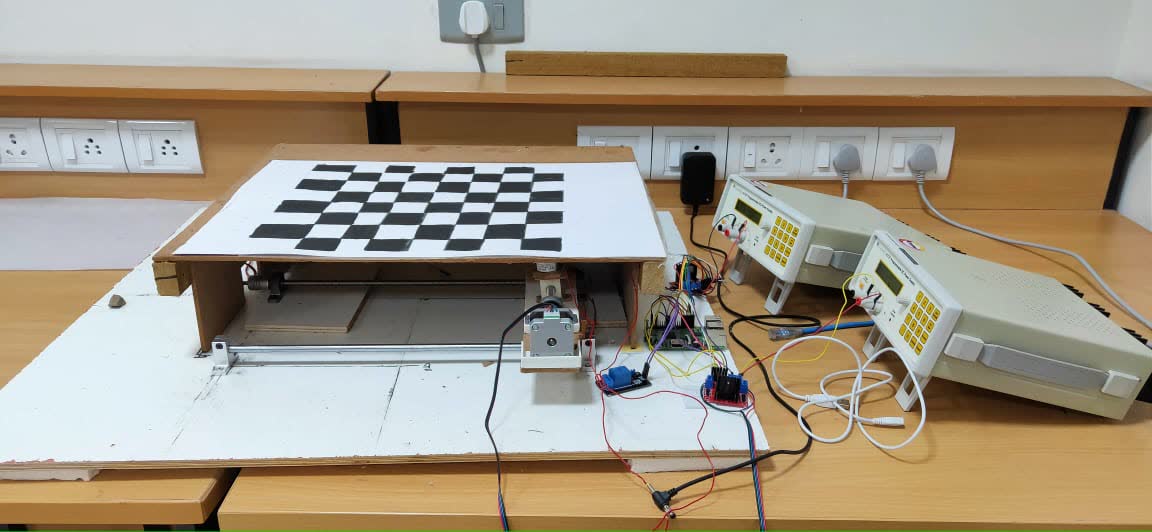
Using two Nema 17 motors and two lead screw mechanisms for X and Y axes, both powered by L298N motor drivers and a relay module to control the electromagnet, chess pieces with strong magnets attached to the bottom slide across the board. Using the Min-Max spanning tree, an initial score is assigned to each player, and the AI minimizes the score of the opposing player while maintaining its own. Each node of the move tree contains the score for the corresponding move; treating scores as weights, Min-Max search selects the best move.
Interface Preview
Outcome

Performance
AI performed above expectations in speed. X motion ran fast and delivered accurately but with some noise. Y motion was smoother but slightly slower due to extra weight. The electromagnet was stronger than expected — mount height was reduced and voltage increased for precision. A new core XY motion approach efficiently handles large weight while maintaining speed. The AI is fast and reliable for low-end embedded systems.
Optimized Navigation using Deep Learning Technique for Automatic Guided Vehicle
This study uses end-to-end learning and replaces numerous sensors with a single camera, commandeering only forward, backward, left, and right controls — a cost-effective solution for autonomous driving navigation.
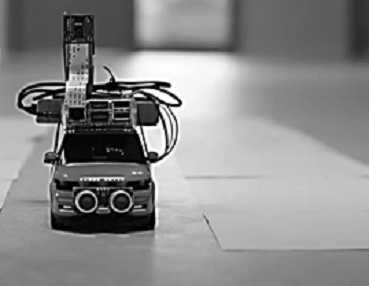
CNN (VGG16 model) was used to train collected data. The system was optimized by cropping unnecessary image parts and mapping pixels from a single front-facing camera to direct steering instructions. The proposed model improved accuracy from 88% (Udacity training dataset) to 98% (proposed). This model is suitable for industrial use and robust in real-time scenarios.
Interface Preview

Outcome

Performance
After rigorous test runs on tracks the car was not trained on, it functions competently in a controlled environment. The neural network gave 98% results — a significant improvement over the baseline.
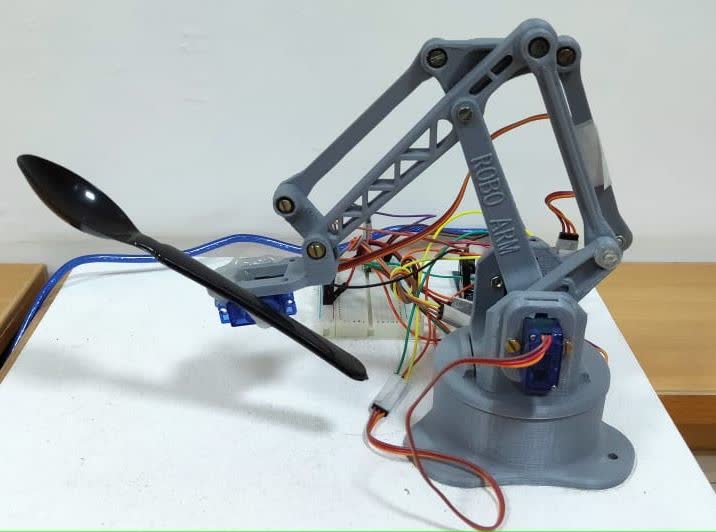
IoT based Smart Assistance Spoon for Parkinson Patients
A microcontroller-based robotic arm with 4 servo motors designed to assist Parkinson's disease patients. Parkinson's disease causes uncontrollable shaking, making it difficult for affected persons to eat. This device automates the feeding process with no effort needed from the patient.
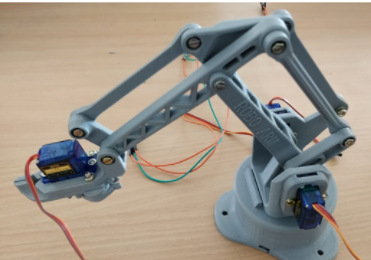
The essential part is a programmable microcontroller-based brick capable of driving four servos to form an anthropomorphic structure. The machine will be useful for repetitive tasks of picking and placing small edibles up to 500 grams per serving. It can also do small assembly work with great accuracy. The technology for assisting people who are functionally challenged has improved over recent decades — this device specifically targets PD patients for whom no cure exists.
Interface Preview

Prototype
Outcome
The robotic arm was successfully implemented, able to pick up food from a tray and direct it toward the user's mouth. The Bluetooth app for connecting, controlling, and terminating the process was also developed.
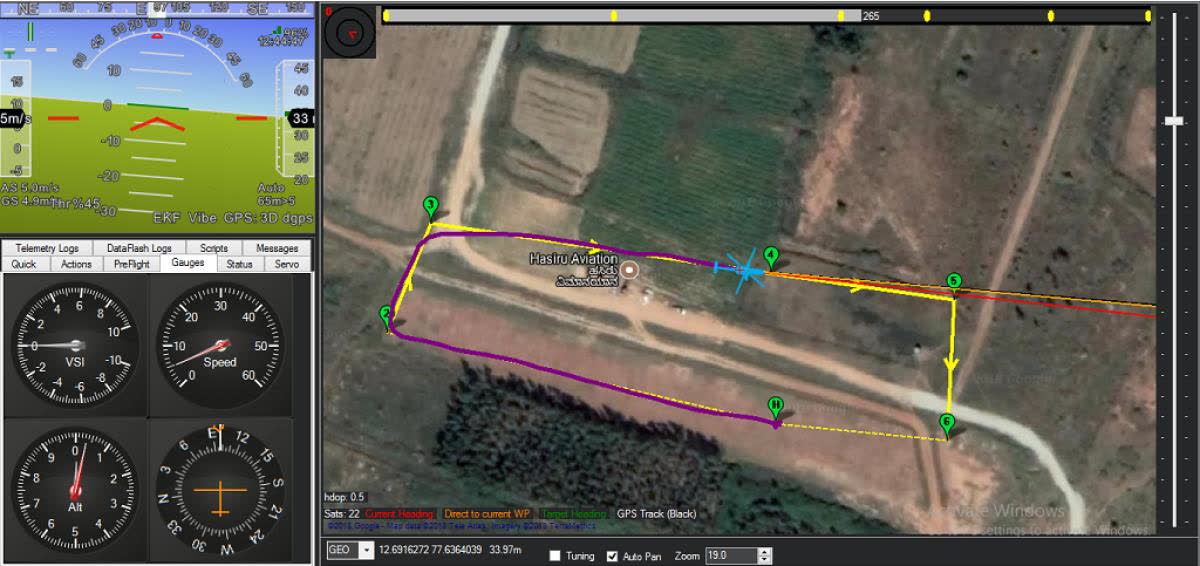
Drone-Based Emergency Response and Surveillance System
An emergency-response and surveillance drone designed to reach flood-affected or otherwise inaccessible locations, provide live situational video, establish two-way communication, and guide first responders while carrying essential supplies.
When a medical emergency takes place during a natural flood, the response time makes all the difference between a life saved and a life lost. Ambulances cannot reach due to flooding. The drone incorporates a two-way video-supported communication channel between operators and first responders. Successful drone usage by lay-persons is currently at 20%. With personalized instructions on the drone, this can be increased to 90%. The drone extends emergency infrastructure with a network of fast compressed video broadcasting capable of bringing emergency supplies and establishing communication.
Outcome
Building a drone providing live video coverage for monitoring. A GPS module gives drone location. After attaching telemetry, waypoints can be given so the drone automatically goes to the required location and returns to its launch point.
Interface Preview
Hardware Interface

Smartphone-based Sleep Staging using 1-Channel EEG
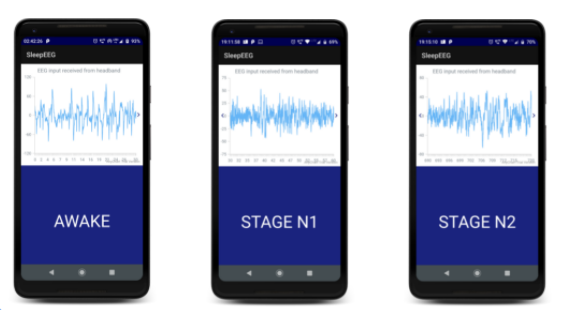
A smartphone-based sleep staging system that informs the user with information such as the duration of each sleep stage, the current sleep stage, etc. — conveniently on a smartphone without the need for external servers, allowing sleep staging without network access.

The EEG band connects to the smartphone via Bluetooth, sending EEG signals to the phone for analysis of the sleeping user. The application scores the sleep and presents information to the user for inferring sleeping patterns. It can also trigger stimuli in specific sleep stages. The project is divided into 4 phases: Research, ML model development, Android app development, and Testing/Improvements.
Outcome
Successfully developed an ML model and Android app. Since EEG hardware was unavailable, the app uses sample data. The app demonstrates input processing and shows results as a chart as well as the current sleep stage. With newer technology and hardware there are many improvements to be made.
Hardware Interface

Performance
IoT based Cloud Enabled Automated Weather Reporting and Prediction System
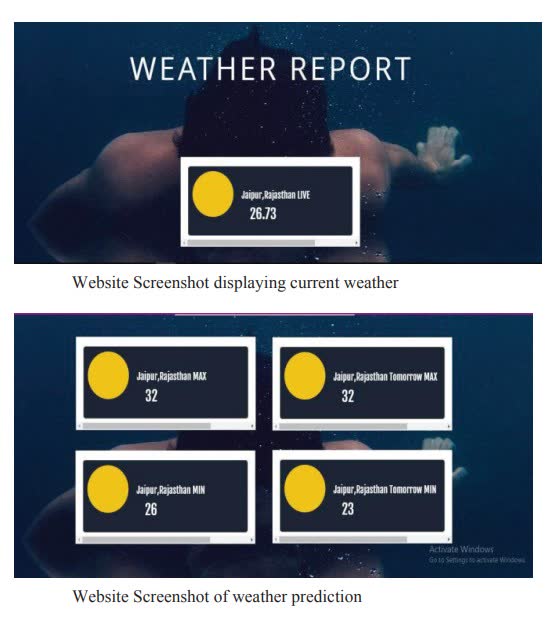
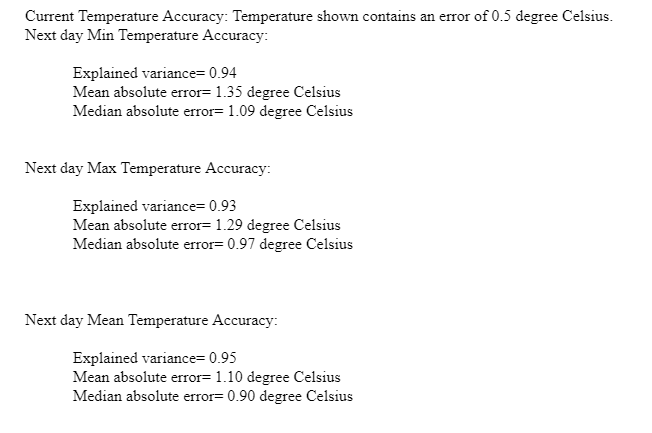
The objective is to monitor and report weather conditions so that one is informed beforehand and necessary actions can be taken to reduce damage by any calamity by forecasting it. The system analyzes temperature, pollutants, humidity and pressure to predict weather — cheaper than existing models.

Through the weather monitoring system, information is collected according to current and previous data and results are produced graphically. The main idea is to coin a system that can sense the main components formulating weather and forecast it without human error. Existing models are expensive in contrast to this system, making monitoring of local areas feasible at lower cost.
Outcome
Parameter values from DHT11 sensors are stored on the internet using cloud, used for further analysis using MATLAB. Collected sensor data can be viewed on a web portal.
Interface Preview
Performance
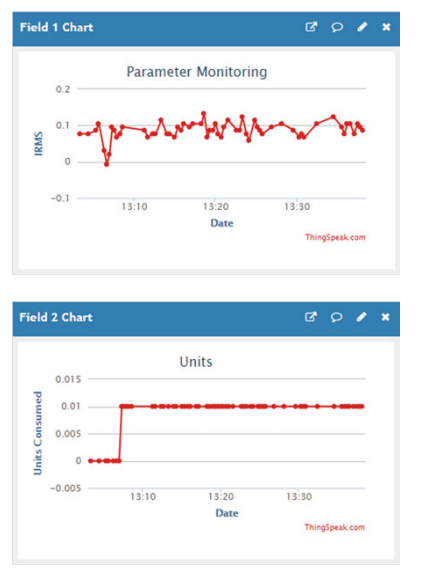
IoT-Based Cloud-Enabled Smart Electricity Management System
Implemented the basic functionalities of an electric meter in a smarter and more efficient manner. Simplified the process of electric meter reading collection and analysis, thereby making it efficient instead of the tedious traditional approach. Users can view consumption remotely from anywhere in the world.
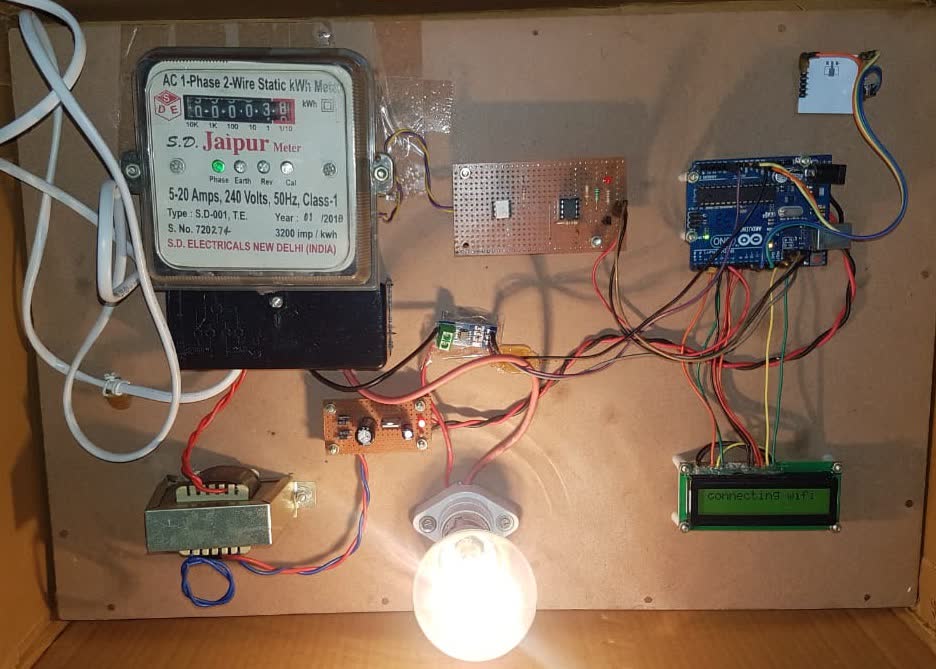
In the age of digitalization, IoT and AI create home automation devices such as automatic security devices and e-meters that make homes smarter and more secure. By employing IoT concepts, the tedious meter-reading process is simplified and recorded over the cloud for easy accessibility. The user can keep a log of how many units a device consumes and verify billing fairness. The new system was more accurate and faster than existing systems, providing remote accessibility, accountability and reliability.
Outcome
Implemented remote electricity-meter monitoring with cloud logging and a mobile interface. The prototype records consumption, presents usage trends, and supports remote review of meter readings for more transparent and efficient billing.
Hardware Interface

Performance
Human Assistant Robot
A self-navigation robot designed to navigate autonomously in any environment. The HAR (Human Assistant Robot) is a personal assistant robot designed to take over tasks such as retrieving water bottles, making tea or coffee, and basic pick-and-place functions without human intervention.
By employing IoT concepts, the process is simplified and recorded over cloud for easy accessibility. The robot can perceive normal objects seen in daily life and pass on information as voice messages — helping the elderly and visually impaired. It can read text messages from an image, act as an empathy robot by detecting facial emotions and playing music accordingly, check for mask compliance, and integrates Amazon Alexa speech assistant technology.
The robot combines environmental sensing, object recognition, autonomous navigation, and voice feedback. Its control pipeline uses onboard microcontrollers and Raspberry Pi processing to detect obstacles, identify common objects, navigate toward fixed service locations, and complete basic pick-and-place tasks through a mobile-assisted interface.
Outcome
Successfully made and navigated the Human Assistant Robot. The HAR is designed to complete pick-and-place tasks, retrieve bottles from fixed locations, and perform basic service operations in an office environment.
Interface
Outcome Video
Drone Based Flying Solution for Medical Emergencies intended in Disaster Management
Sensors monitor vital health parameters (ECG, heartbeat, Temperature, Pressure) via a wearable device. A drone carries the device to the destination and then carries medications back from the doctor to the patient for temporary relief — bridging the gap in disaster zones.

Data is continuously gathered to an automatic processing system and made available to medical staff who may take necessary actions in emergency cases. The doctor has an application to fetch data from the cloud to their phone in real-time. Based on data variations from the patient's body and with medical experience, the doctor prescribes treatment. Mean time while the doctor analyzes data, the drone flies back with medications for temporary relief or extension of the emerging situation.
Outcome
Designed a sensor protocol hardware wearable architecture for a variety of bio-parameter sensors. Developed energy-efficient cooperative application. Implemented and assessed the performance of the protocol stack in a WBAN testbed. Integrated proposed solutions in real medical devices. Data stored in cloud can be further enhanced for predictive maintenance in cloud health service systems.
Interface
Hardware Interface

Evaluating and Improving Chatbot Techniques
Development of a chatbot or intelligent conversational agent using Machine Learning/Deep Learning. The project experiments with two main self-learning bot techniques: retrieval-based and generative techniques. A GUI was also developed to explore both techniques interactively.
The Reddit comments dataset was used as it contains comments from several fields, better replicating human interactions. A scoring mechanism filters conservative and professional answers. A new method allows audio input commands without requiring a unique identifier at the start of a sentence — enabling more natural interaction. This paper presents a new method which allows a user to interact with the chatbot in a more human way.
Outcome
The most widely used metric for evaluating dialogue systems is BLEU. The project yielded a BLEU score of 3.3 — good for a generative chatbot with uncleaned data. The training loss decreased substantially after training on approximately 70k comments.
Interface
Hardware Interface

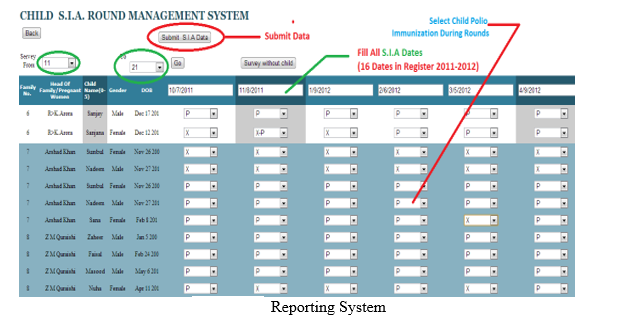
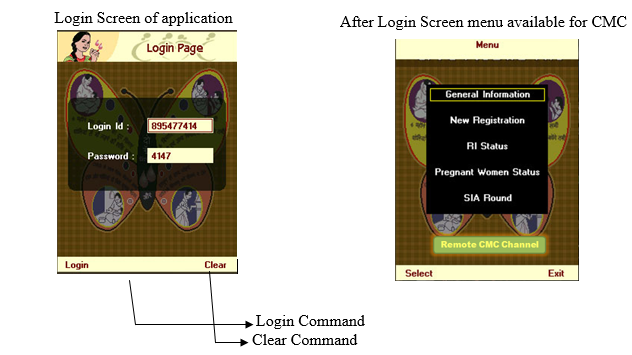
M-Training Toolkit on Polio/Routine Immunization for CMCs in CGPP
The primary strategy to interrupt transmission of wild poliovirus in India is to improve supplemental immunization activities and routine immunization coverage in priority districts, with a focus on 107 high-risk blocks of western Uttar Pradesh and central Bihar.
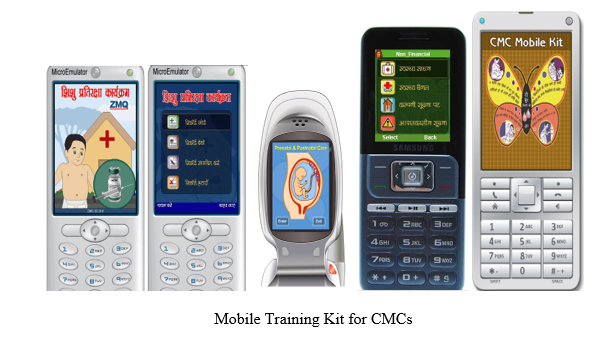
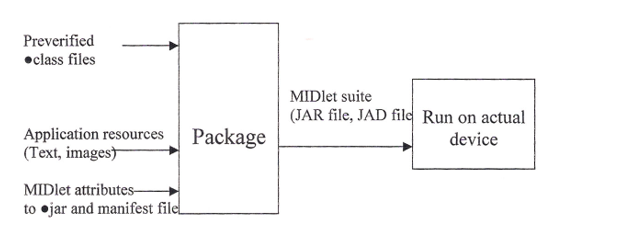
Villages or urban areas with a history of wild poliovirus transmission, or hard-to-reach or resistant populations, are categorized as high-risk areas within blocks. The Social Mobilization Network (SM Net) is formed in Uttar Pradesh to support polio eradication efforts through improved planning, implementation and monitoring of social mobilization activities in those high-risk areas.
Outcome
Vaccination outcomes in SM Net areas were as high as or higher than in non-SM Net areas. There was considerable variation in vaccination outcomes between districts.
Interface
Hardware Interface
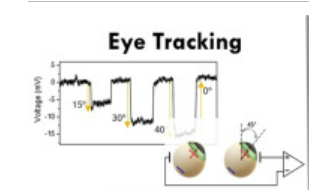
Automatic Wireless Eye Monitoring System
A wireless communication system designed and developed for remote patient monitoring, enabling instant data collection, content development and better client interaction for eye care monitoring.
Outcome
Hardware Interface
Interface
Energy Consumption Optimization for Smart Classroom using Computer Vision
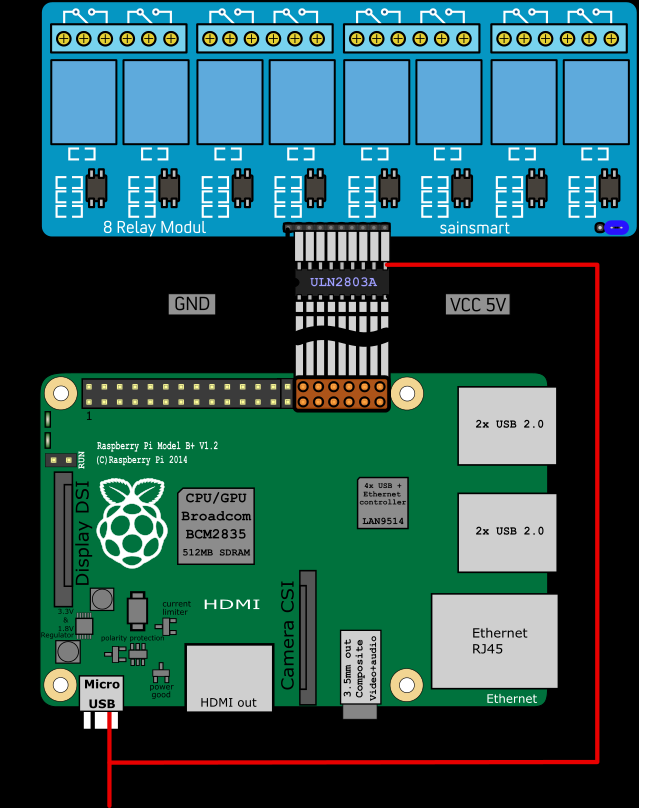
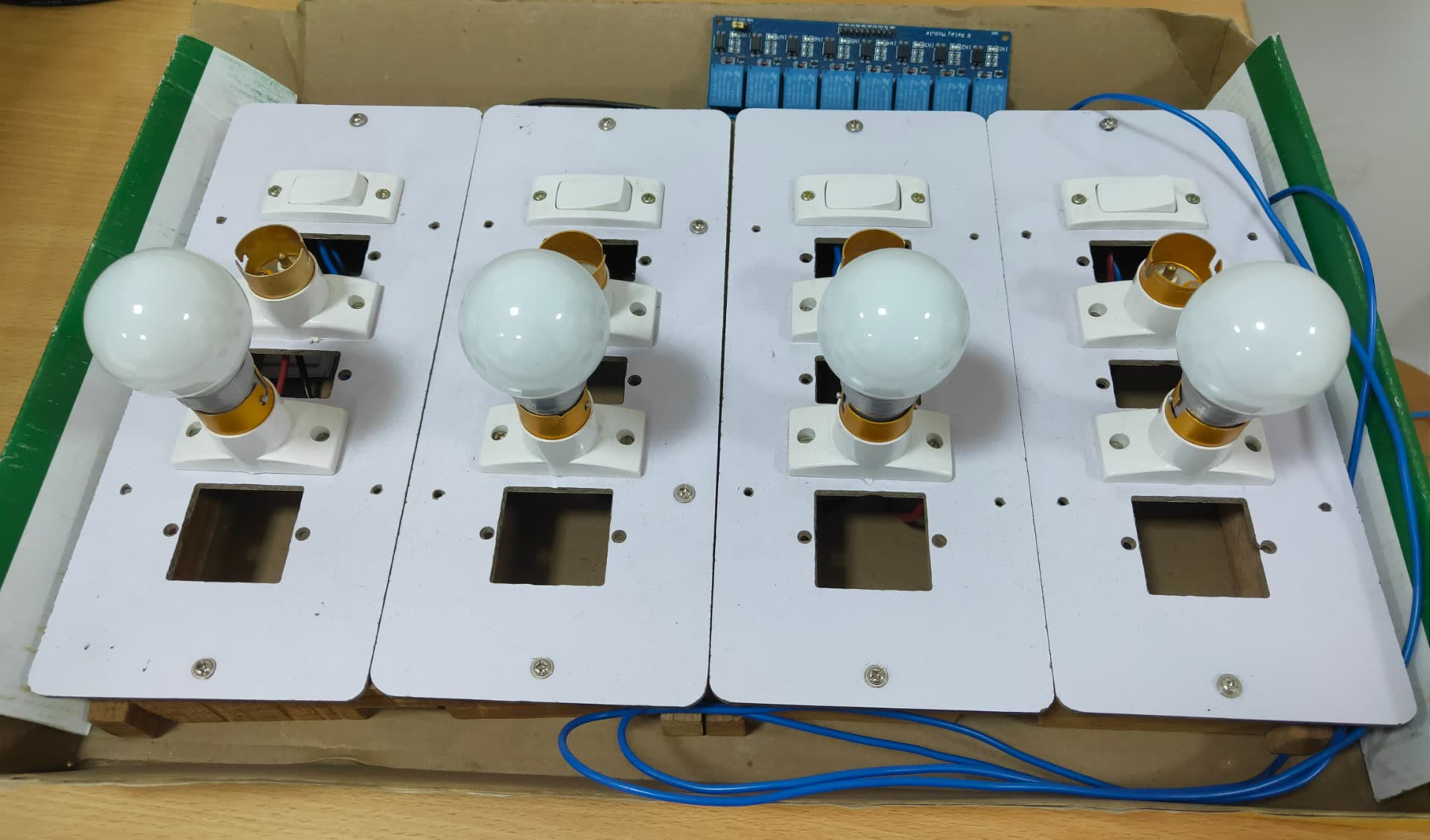
Reduces unnecessary energy consumption of a smart home, office or classroom using Computer Vision. An integrated system in each room transfers environmental parameters to the management station, directly controlling home appliances.

Computer Vision is used to implement a smart home control network. A coordinator integrated into Raspberry Pi is established in each room, responsible for transferring environmental parameters obtained by sensors to the management station. The control messages for home appliances are directly transferred. Analysis of fluorescent lamp illumination along with coordinate delay enables more energy conservation.
Outcome
The energy saving of lighting systems relative to those without smart control was evaluated. Electricity consumption can be reduced by at least 40% under smart control. Experimental tests demonstrate the proposed system is practically feasible and performs well.
Hardware Interface
System Prototype
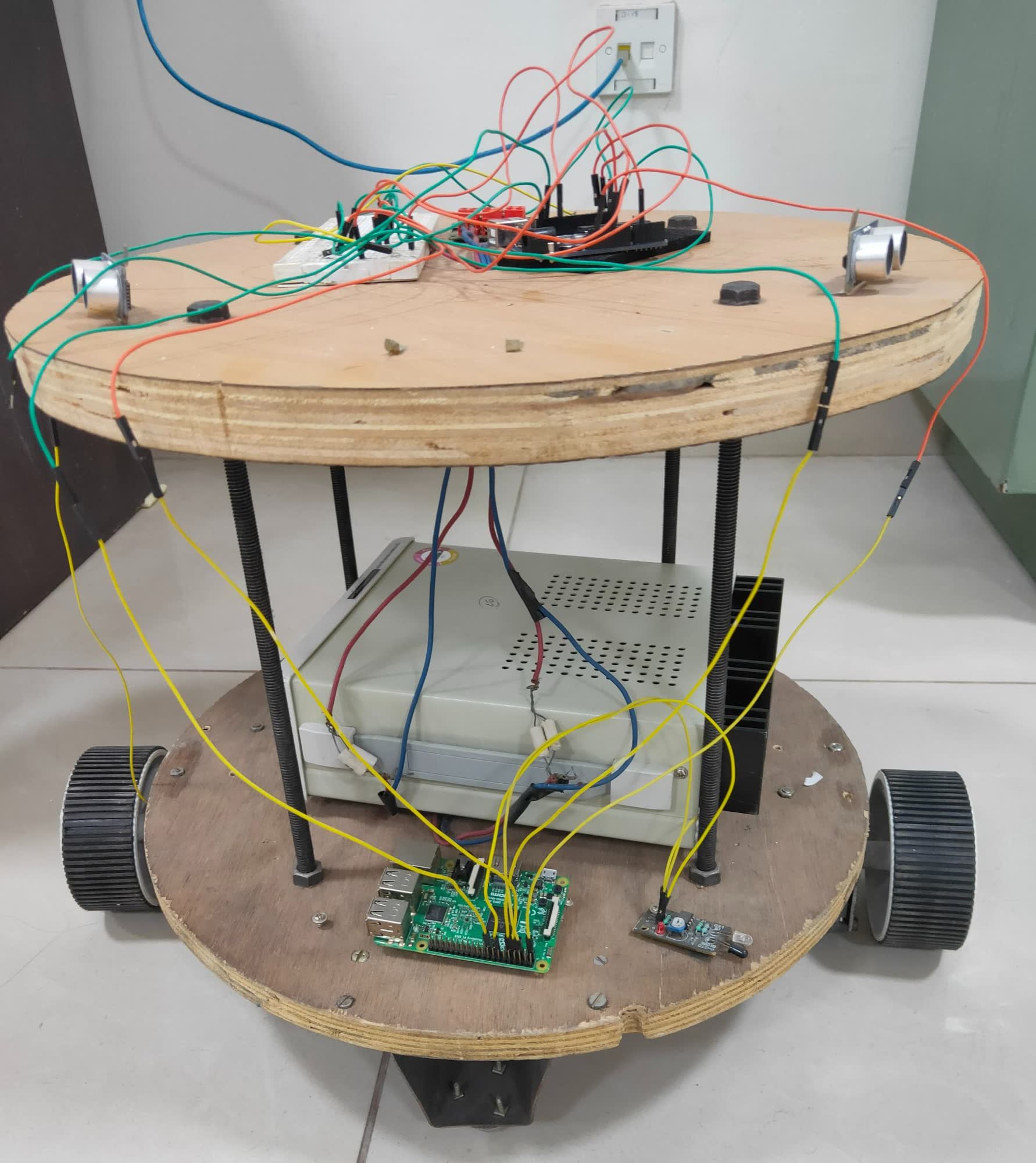
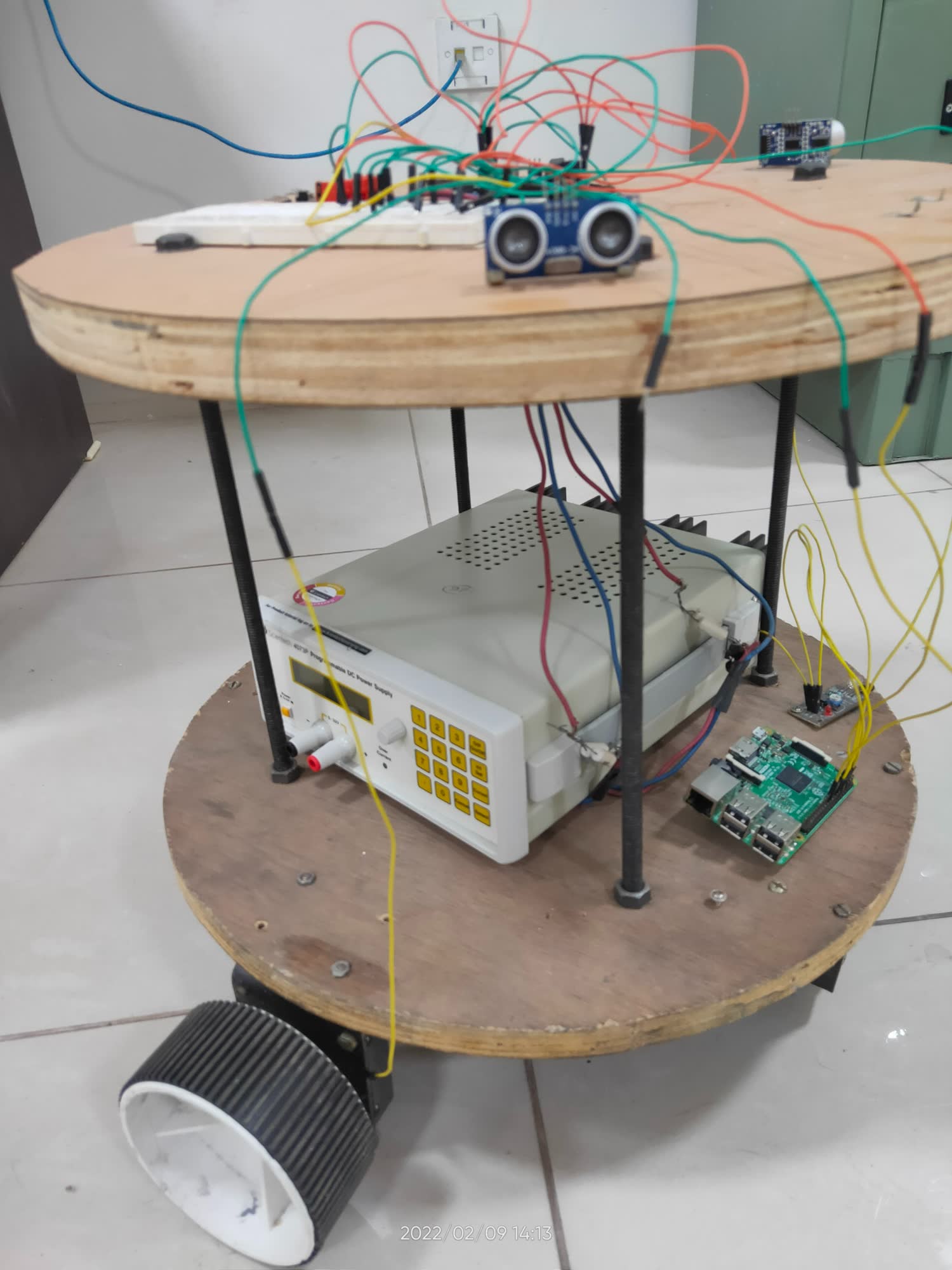
Unmanned Autonomous Grounded Surveillance Rover
The inevitability of robots is fundamentally a result of the need to reduce manpower requirements in military organizations while sustaining capability needs. The evolving operational environment places increasing demands on soldiers and exposes the limitations of the human body — supporting the adoption of autonomous robots.
This robotics research prototype explores multi-agent coordination for field monitoring, remote inspection, logistics support, and environmental monitoring. The work focuses on optimal control strategies for autonomous and semi-autonomous inspection rovers, with emphasis on reliable coordination, synchronized movement, and stable behavior in dynamic outdoor conditions.
Outcome
Developed a grounded rover prototype for autonomous and semi-autonomous inspection, combining obstacle sensing, camera-based monitoring, and coordinated movement for field surveillance scenarios.
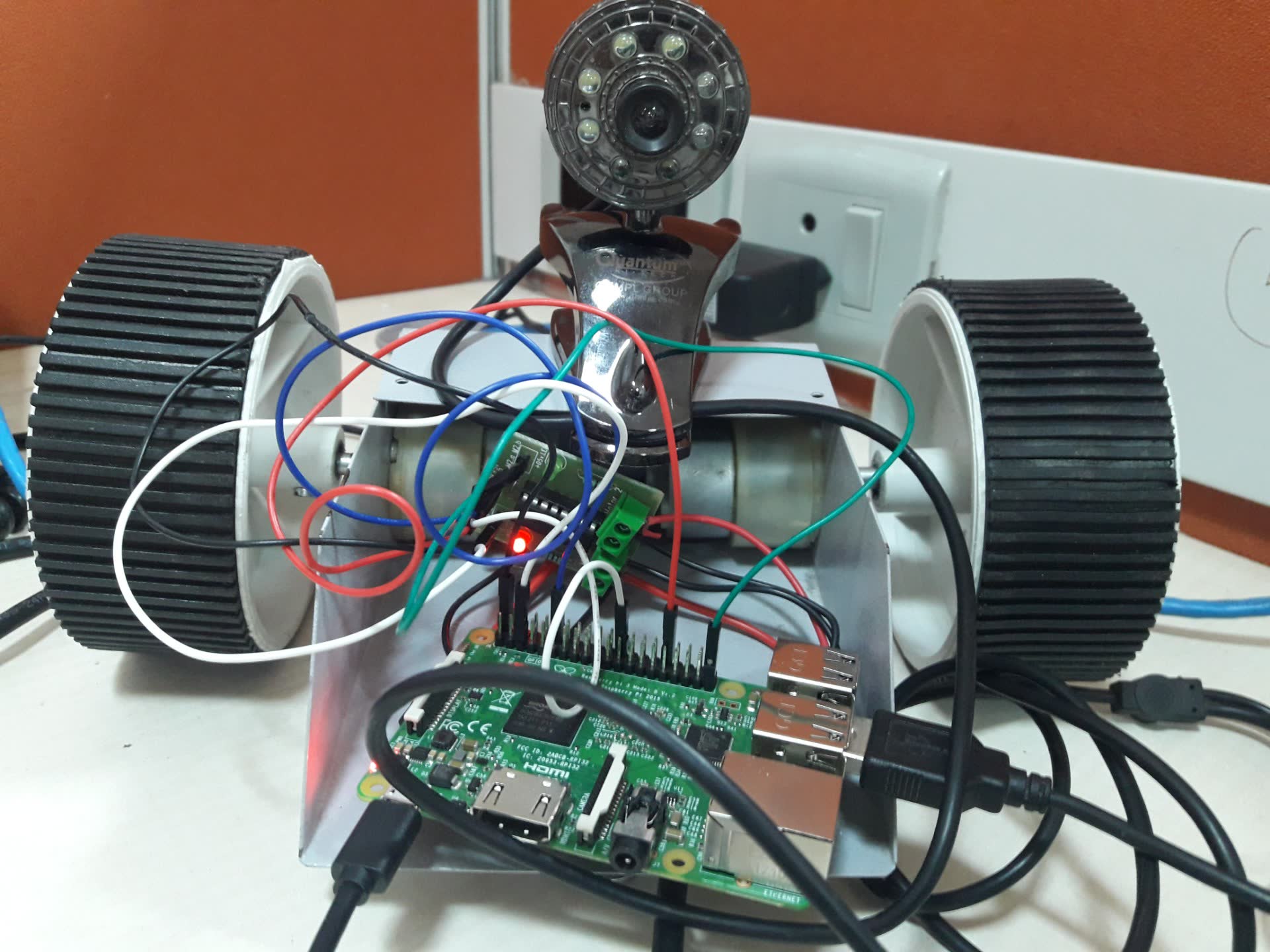
IoT based Surveillance Rover
A mini robot with a self-neural schema framework for autonomous control and decision making. Most application systems give outputs according to predefined conditions. This robot overcomes that limitation, navigating autonomously through a maze while avoiding obstacles and using a camera for extended view.
The inevitability of robots is fundamentally a result of the need to reduce manpower requirements in military organizations, while sustaining the capability needs of the organizations. The need to reduce manpower is driven by trends in the macro environment for military organizations, which include aging demographics and reducing public tolerance to human casualties. The evolving operational environment that places increasing demands on soldiers and exposes the limitations of the human body also supports the adoption of robots.
Outcome
Built an IoT-enabled surveillance rover capable of navigating a constrained environment, avoiding obstacles, and transmitting an extended camera view for remote monitoring.